I originally became interested in the problem of visualizing planar symmetric
attractors back in 1988 - that project eventually contributed to the book 'Symmetry in Chaos'
that I wrote with Martin Golubitsky and which was published in 1992 (a second edition in 2009).
Over the years I developed, partly as a counterpoint to my mathematics research, the software and
coloring algorithms needed to produce images of 'two-color' symmetric attractors.
Here my aim was to produce images that, to me at least, were more interesting artistically - a matter
of using mathematics as a tool in artistic creation. More recently, I have been able to adapt some of the
programs I have written to produce tools for the visualization of rather complex dynamics. This is very
much a work-in-progress. The two images shown are both based on various
types of hybrid dynamics (mixes of deterministic, discontinuous and random dynamics).
Artworks
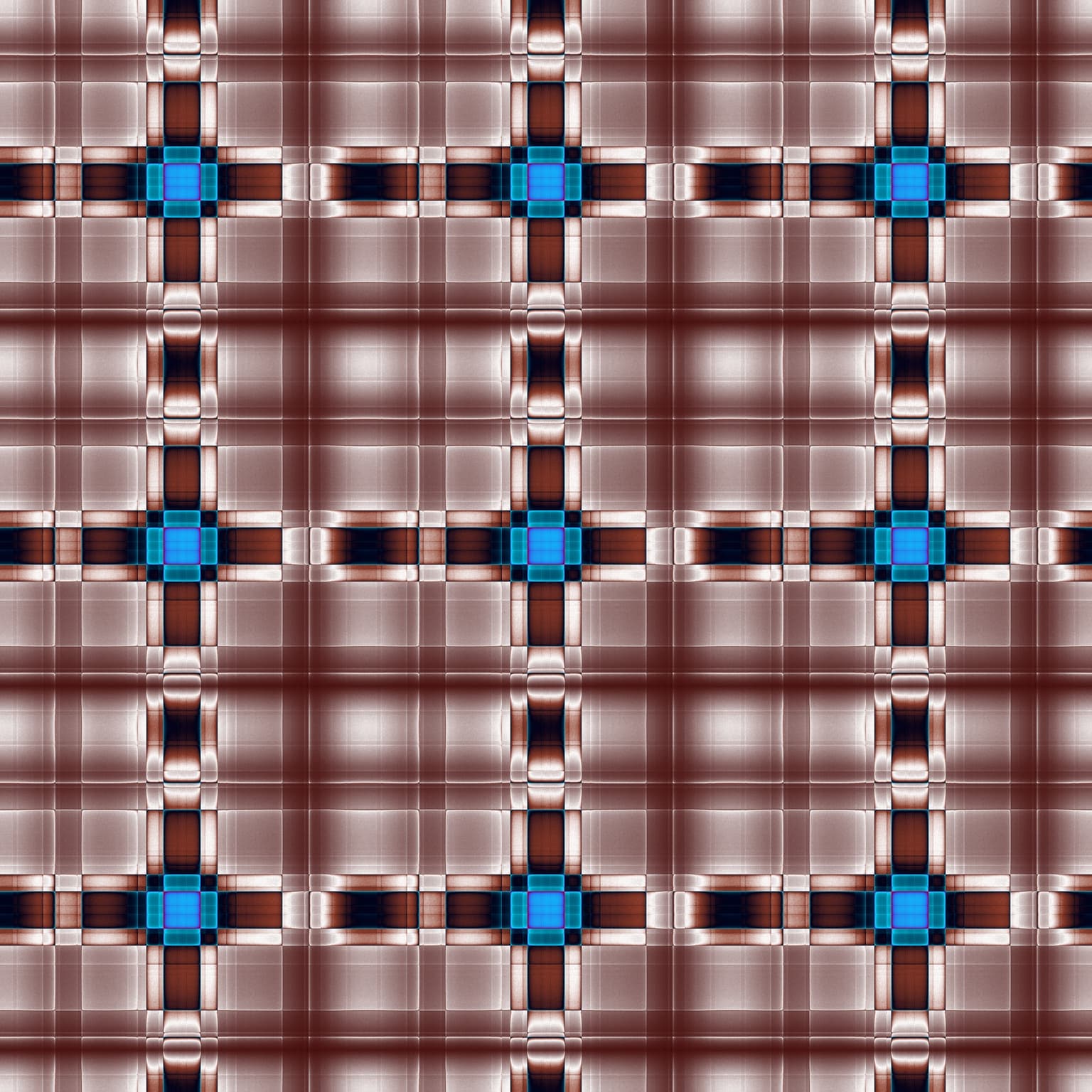
Hybrid 101
24 x 24 (framed)
Archival inkjet print
2011
Hybrid 101, is a representation of an invariant measure for a dynamical system on a 2-torus with deterministic and random components. Deterministic dynamics is given by the product of two identical circle maps with topological degree 2 ('doubling maps') together with a random component which is a place dependent iterated function system: probabilities and direction and size of jumps depend on the position on the torus. Hybrid dynamics combining deterministic dynamics with an iterated function system was first studied mathematically by Kobre and Young in the context of extended dynamical systems on the line. In Hybrid 101, dynamics is defined by doubly 1-periodic maps on the plane and we reduce mod the integer lattice to obtain dynamics on a torus. We lift the measure back to the plane to obtain a repeating pattern. Appearances can be deceptive: the only symmetries of the repeating pattern are translations (the pattern is of type p1) and all the lines are straight.
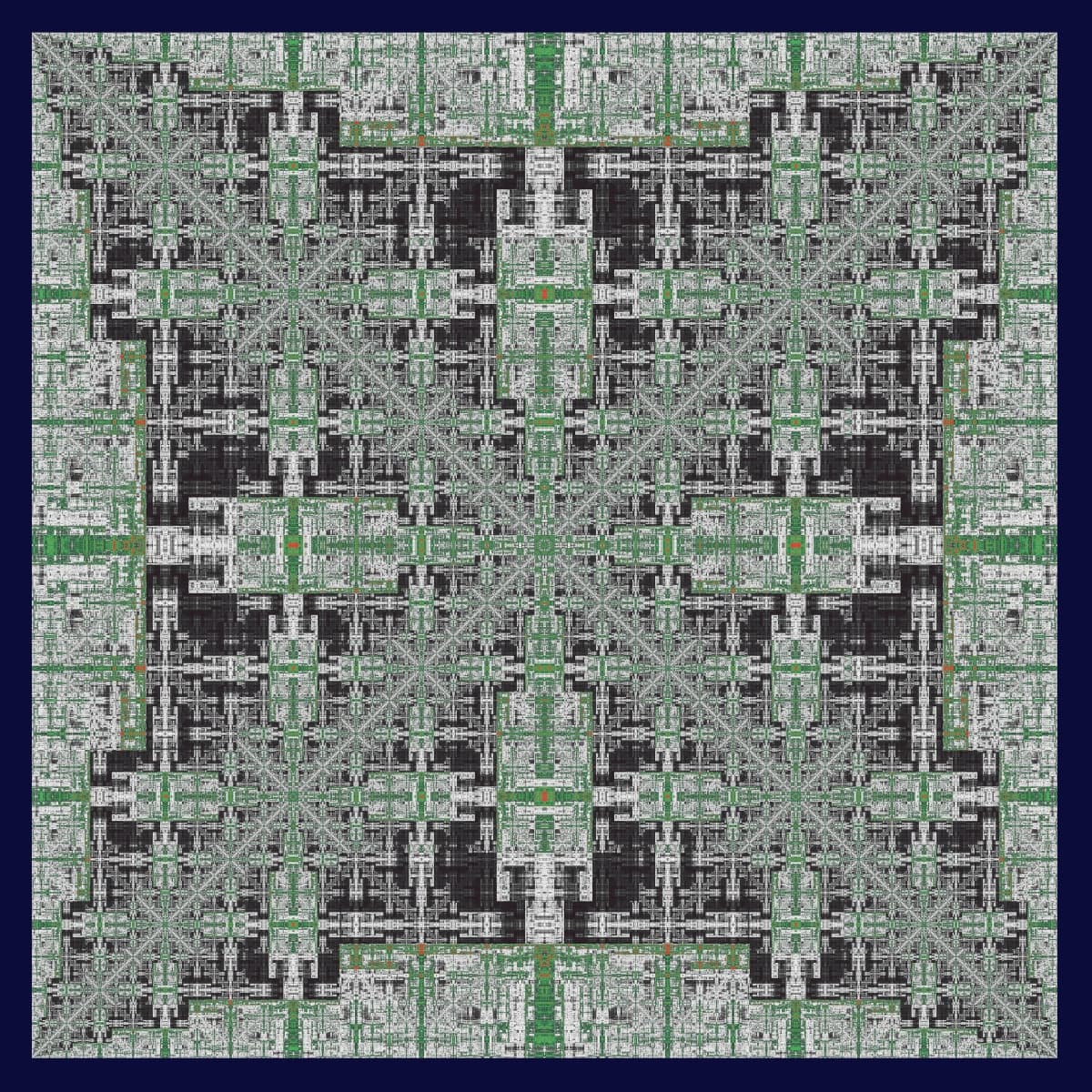
Neural chip, 2051
24x24 (framed)
Giclee print.
2011
Neural chip, 2051 is a representation of an invariant measure for a
'hybrid' iterated function system (IFS) defined on a 2-torus. The base IFS is
defined by uniform contractions at the vertices of a square. The
contractions are slightly greater than one half - this leads to some interesting overlaps... If the iteration lands within certain designated rectangular regions on the square then a jump occurs with preassigned probability. Depending on probabilities and regions, dynamics on plane has a drift with vertical
and horizontal components. Inspired partly by earlier work of Kobre
and Young, Filiz Tumel (a PhD student at UH) and I started investigating
this type of system early in 2011. If we reduce mod 1, we obtain dynamics
on a torus and an associated invariant measure. In Neural Chip, 2051,
the coloring is chosen to reflect the extreme complexity of
the associated invariant measure.