Gary Greenfield
Artists
Gary Greenfield
Professor Emeritas of Mathematics & Computer Science
University of Richmond
Richmond, Virginia, USA
Statement
Most of my computer generated algorithmic artworks arise from visualizations of mathematical processes or biologically inspired processes. I strive to focus the viewer's attention on the complexity and intricacy underlying such processes.
Artworks
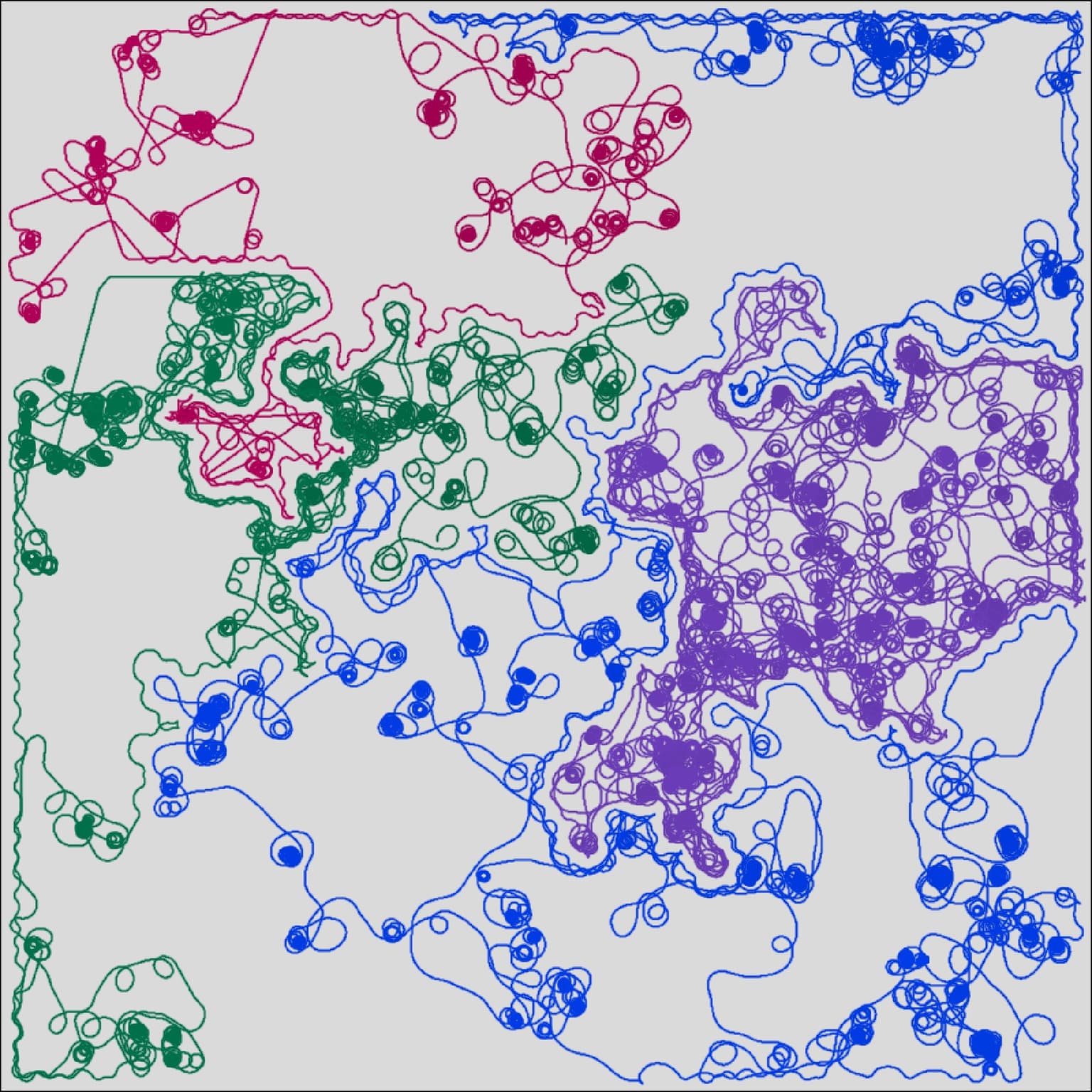
Avoidance Drawing #23109-6
25 x 25 cm
Digital Print
2015
Avoidance drawings arise from k virtual drawing robots (drawbots) executing random walks based on curvature, via a model introduced by Chappell, subject to the rule: drawbots must pivot to avoid crossing the paths of other drawbots and the boundaries of the n x n square on which they roam. Drawbot paths partition the square into k simply-connected regions. When k = 4, n = 1000, and initial drawbot orientations are fixed there are (10)^24 possible starting configurations. After storing a stream of pseudo-random numbers for drawbot decision making, I use a genetic algorithm to identify configurations that maximize the minimum taken over the number of white squares neighboring each path obtaining avoidance drawings such as the one shown here.